
全国服务热线: 18124039846


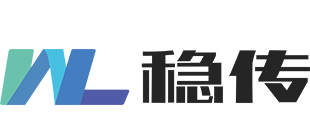
据Grand View Research数据,2024年全球割草机市场规模为42亿美元,预计2022-2030年的年复合增长率将达 5.7%。
从保有量角度看,欧洲市场约1.5亿户家庭住宅,美国市场 1.3亿户家庭住宅,其中约60%-70% 拥有住宅花园,即将近8000万。当前割草机器人整体保有量渗透率不足3%。若乐观假设,到2030年欧洲整体保有量渗透率提升至30%,美国提升至20%,割草机器人保有量将增至4000+万台。
从增量替代角度分析,割草机器人正逐步替代手推式和手持式割草机。目前全球手持+手推式割草机销量在2600-3000万台,美国市场1400-1500万台,欧洲市场1200-1500万台。割草机器人在欧洲销量渗透率为7%-8%,美国为1%。保守假设到2030年,欧洲销量渗透率提高到20%-30%,美国为10%-20%,则割草机器人年销量将突破500+万台。

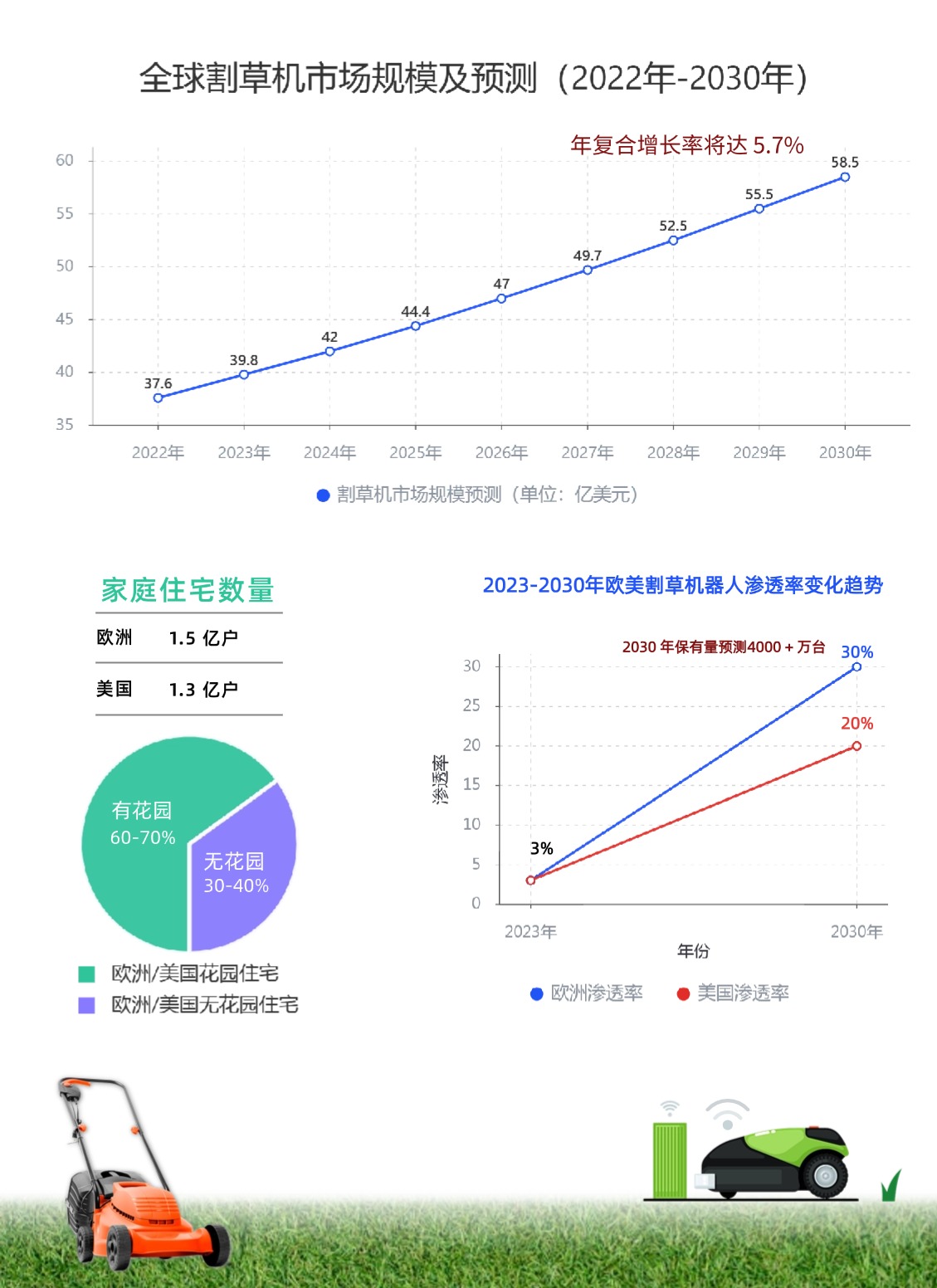
目前国内割草机普遍采用“RTK+视觉”的技术路线,激光雷达因成本较高尚未成为主流。例如追觅是首家将激光雷达用于割草机器人的厂商。激光雷达精度高、部署简便且不受遮挡影响;而RTK方案则需搭建基站,信号易受干扰且依赖视觉辅助。此外,还有部分企业尝试其他技术组合,如科沃斯早期有尝试过UWB+双目视觉路线。
在竞争格局方面,市场参与者众多,既有传统园林工具企业,也有科技企业跨界进入。当然,也有不少先后停掉相关业务的,如安克创新、iRobot、河森堡等。
UWB 定位技术基于时间差测量(TDOA)或到达时间(TOF)的测距方法,利用超宽带脉冲信号的高时间分辨率实现厘米级定位精度。其抗多径干扰能力强,电磁兼容性好,能效较高,功耗低。
在避障方面,UWB配合其他如摄像头、碰撞传感器等,能够实时、精准地感知割草机周围障碍物的位置,实现更可靠的避障。在庭院等复杂环境中,存在树木、台阶、围栏等多种障碍物,UWB的高精度定位可帮助割草机更好地识别和避开这些障碍物,降低碰撞风险,保护割草机和周围物品安全。
从作业效率优化角度,精准的定位可以让割草机合理规划割草顺序和速度,减少不必要的移动和等待时间,提高单位时间内的割草面积,从而提升整体作业效率。

2022年10月,科沃斯推出了智能割草机器人GOAT G1,首次使用UWB超带宽无线载波通信技术。当时,UWB技术被期望能够提升割草机器人的定位精度和环境感知能力,为用户提供更智能、高效的割草体验。
在实际应用中,UWB技术确实在一定程度上提高了割草机器人的定位精度,在信号良好的情况下,能够辅助割草机更准确地规划路径和执行割草任务。然而,UWB也暴露出明显的缺点。移动端(割草机器人本体)为取得精准坐标,至少需要三个信号源来计算并获取xy坐标值(若是有高度差的草坪还需要考虑z轴坐标值,则至少还要多布一个信号源),这不仅增加了成本,还需要在家庭草坪庭院内安插至少3个信号桩,且信号桩可能还需稳定供电(内置电池则需定期更换),给用户带来极大不便。此外,UWB在遮挡环境下信号衰减显著,定位精度不如RTK,科沃斯后续产品因此放弃了UWB,转为RTK+视觉路线。
UWB信号在遇到遮挡时,如被建筑物、树木等遮挡,信号衰减明显,导致定位精度大幅下降甚至定位失效。在庭院环境中,花园内的树木、亭子等障碍物众多,会严重影响UWB信号的传播,使得割草机器人在这些区域难以获得准确的定位信息,无法正常作业。实际应用中,与RTK等技术相比,在复杂环境下,UWB难以持续提供稳定、高精度的定位,影响割草机的作业质量和效率。

如前文所述,割草机器人本体要实现精准定位,需多个信号源,这增加了硬件成本。每个信号源的采购、安装以及维护都需要投入资金,使得采用UWB方案的割草机器人整体成本上升,在市场竞争中处于价格劣势。
在家庭庭院中部署UWB信号源,需要考虑信号源的位置选择、高度设置、供电方式等诸多因素。信号源位置设置不当,会影响定位精度;供电问题若处理不好,如采用内置电池需频繁更换,会给用户带来极大不便。相比之下,一些其他定位方案,如“RTK + 视觉”中的RTK方案,虽然也有基站搭建问题,但在信号覆盖和维护方面相对UWB的多信号源部署要简单一些。
UWB技术的频段使用等受到相关法规的严格限制。2023年工信部对UWB技术的使用频率范围进行了收窄(规定UWB地面工作频率范围在 CH7-CH9),并对发射功率进行了严格限制(等效全向辐射功率谱密度限制为不大于-41dBm/MHz)。这可能导致一些基于旧频段设计的UWB设备需要进行升级或重新设计,增加了企业的研发成本和时间成本。
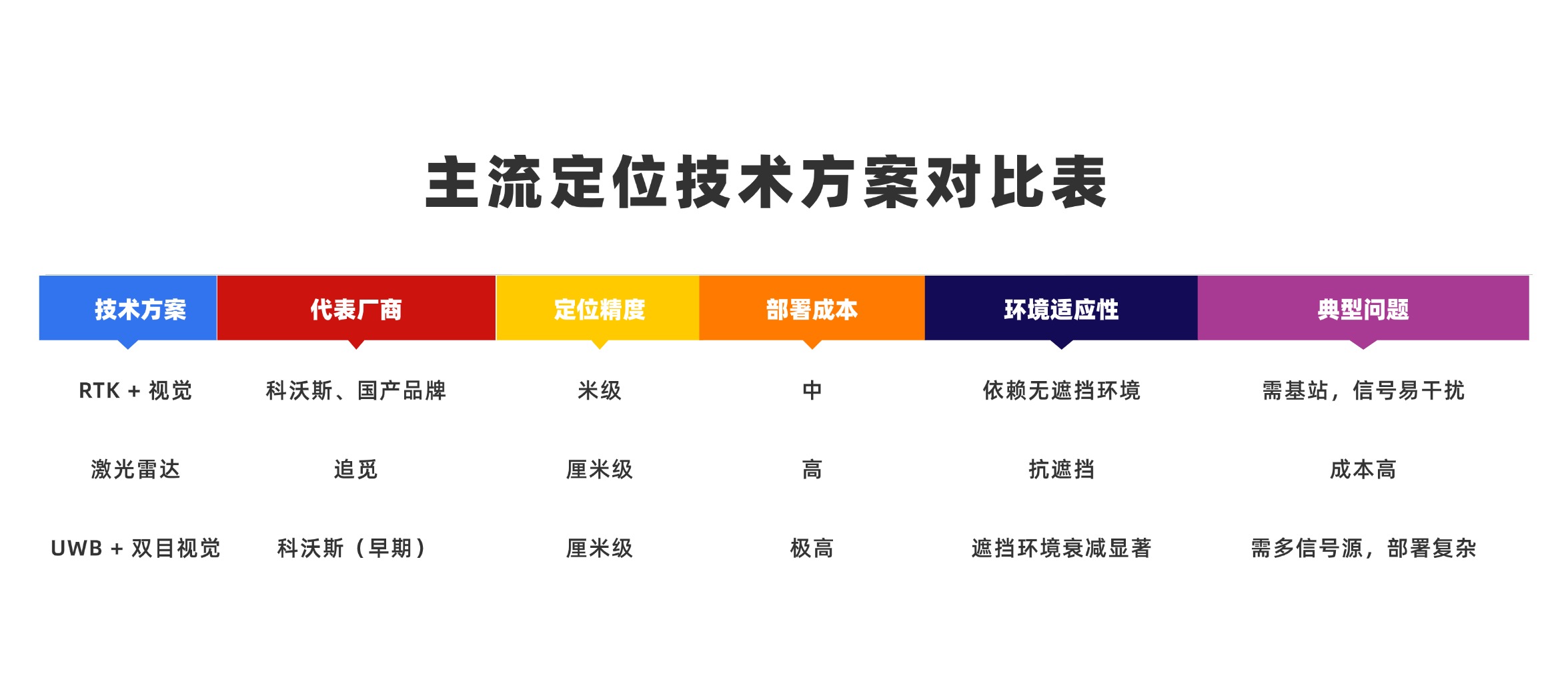
UWB与惯性测量单元(IMU)具有互补性。UWB提供全局绝对位置,但易受遮挡影响;IMU通过加速度计和陀螺仪测量载体的线加速度和角速度,通过积分计算位置和姿态,具有高频输出(≥100Hz)、实时性强的特点,适用于动态环境下的姿态估计,但存在累积误差随时间增长的问题。通过扩展卡尔曼滤波器(EKF)融合两者数据,可实现优势互补:UWB校正IMU的累积误差,IMU弥补UWB的低更新率。
在割草机作业时,当UWB信号受到遮挡,IMU可以继续提供相对运动信息,保证割草机的姿态和位置估计的连续性;而当UWB信号恢复正常时,又可以对IMU的累积误差进行校正,从而提高整体定位的鲁棒性和精度。
在一些研究和试验中,将UWB与IMU融合的方案应用于割草机模型。结果显示,在模拟的复杂庭院环境中,割草机在面对信号遮挡等情况时,依然能够较为稳定地保持作业路径,定位精度在一定程度上得到保障。相比单独使用UWB或IMU,融合方案减少了定位误差的累积,提高了割草机在动态环境下的适应性。然而,该方案在实际大规模应用中仍面临一些挑战,如EKF算法的计算复杂度较高,对割草机的硬件计算能力有一定要求,可能增加硬件成本;同时,如何进一步优化融合算法,以更好地适应不同环境和作业场景,还需要深入研究。
除了与IMU融合,UWB还可以与其他传感器如激光雷达、摄像头等进行融合。与激光雷达融合时,激光雷达可以提供高精度的周围环境三维信息,UWB则提供精确的定位信息,两者结合可以使割草机更全面地感知周围环境,在复杂地形和障碍物较多的情况下,实现更精准的避障和路径规划。
与摄像头融合,摄像头可以通过图像识别技术识别草坪边界、障碍物类型等信息,UWB负责定位,两者相互补充,能够提高割草机对环境的理解和应对能力。例如,在光线良好的情况下,摄像头可以准确识别草坪中的小障碍物,UWB确保割草机准确停在障碍物附近进行规避操作,从而提升割草机在复杂环境下的作业安全性和效率。但多种传感器融合也带来了数据融合算法复杂度增加、硬件成本上升以及系统稳定性维护等一系列问题,需要进一步探索解决方案。
在短期内,由于UWB技术自身的局限性以及市场上已有更成熟、更具性价比的定位方案(如“RTK + 视觉”),UWB在割草机行业的应用推广可能会面临一定困难。企业可能会更多地将UWB与其他技术进行小规模的融合试验,探索其在特定场景下的应用潜力,如在一些地形特别复杂、对定位精度要求极高的高端割草机产品中,尝试UWB 与其他传感器的融合方案,以满足特定客户群体的需求。同时,随着 UWB技术在其他领域(如智能手机、汽车等)的应用逐渐普及,相关硬件成本可能会有所下降,这也为UWB在割草机行业的潜在应用提供一定的成本优化空间。

从长期来看,如果UWB技术能够在信号遮挡、成本降低、部署便利性等方面取得突破,其在割草机行业仍具有较大的发展潜力。例如,若研发出能够有效穿透遮挡物的UWB信号增强技术,或者通过技术创新大幅降低多信号源硬件成本和部署难度,UWB有望在割草机定位领域占据更重要的地位。此外,随着智能家居、智能庭院概念的不断发展,割草机作为智能庭院的重要组成部分,对其智能化、精准化作业的要求将不断提高。UWB技术若能与未来更先进的传感器技术、人工智能算法深度融合,实现更高效、智能的割草作业,将有可能迎来市场应用的爆发期。同时,随着全球环保意识的增强,电动智能割草机市场规模将不断扩大,这也为UWB等先进技术在割草机行业的应用提供了更广阔的市场空间。

